Tutorials
Modelling objects with movement constraints and placing them in the FloorPlan model of an indoor environment.
This chapter contains 3 tutorials with the objective of building an understanding of the composable modelling approach, and how it is used to extend the use case of the FloorPlan DSL. The first tutorial covers the concepts behind modelling a common object with a motion constraint: a door. Then, in the second tutorial we place an instance of the door in the floor plan generated by the FloorPlan DSL. The final tutorial covers the modelling of states, and how we can assign an initial state to a door instance. These tutorials build upon ideas presented in the modelling kinematic chains tutorial; as well as ideas presented in the modelling an indoor environment tutorial.
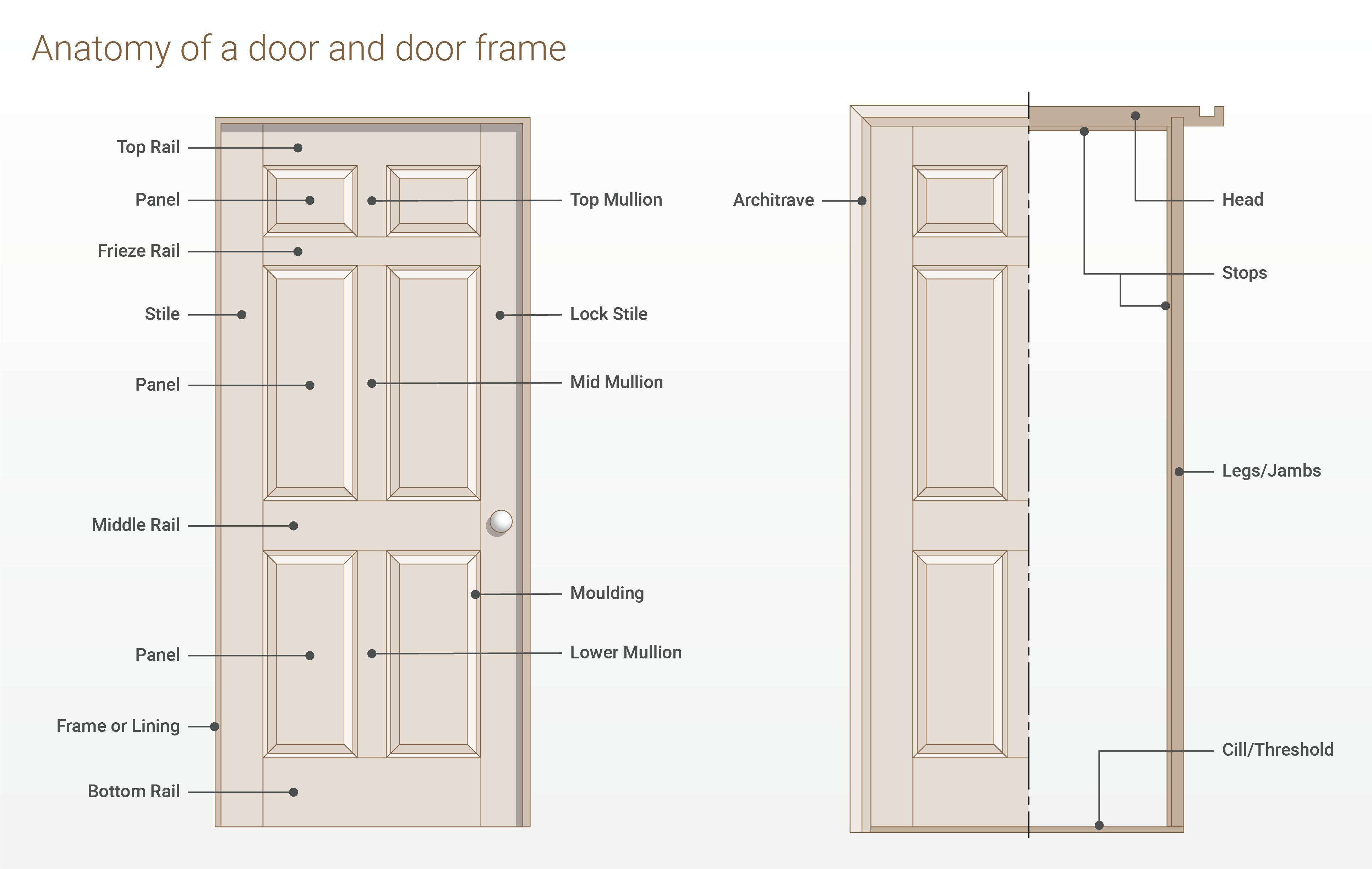
We use the following terminology for door parts:
Background
Composable modelling enables the creation of semantic rich models that are easily extendible and reusable. We use JSON-LD to represent our models and metamodels, as the format allows composition by linking models through unique identifiers. Composable models expressed in JSON-LD consist of a @graph with elements that conform to one or multiple metamodels, which are specified in a @context. Each element is a JSON object with a unique identifier (@id), a list of metamodel concepts it conforms to (@type), and a set of properties conforming to the metamodel concepts. For example, a composable model of a vector can be modelled by (i) giving the model a unique id, (ii) selecting the list of relevant concepts for a bound vector in 3D space, and (iii) referring to a 3D Point model for the start property. This model of a vector can be referred to by its identifier by another model in the graph.
{
"@id": "vector-joint-door-hinge-joint-x",
"@type": [ "3D", "Euclidean", "Vector", "BoundVector", "UnitLength" ],
"start": "point-door-hinge-origin"
}
The FloorPlan DSL can transform the TextX models into composable models. This has the ability to extend the possible applications for the models. For instance, the tool used in this tutorial is a companion tool that allows to model objects with movement constraints and place them in the indoor environments described in the FloorPlan DSL. This companion tool was developed using the RDFLib, which is used to navigate the graph and interpret the models. While there is no tutorial on creating such a tool, the companion tool presented in this repository is well documented and can be used as a guide for developing new tools.
The scenery_builder not only consumes the composable models from the FloorPlan DSL, but also re-uses other metamodels from the ExSce workbench in order to model dynamic objects. These are the kinematic chain metamodel and the finite state machine metamodel. The kinematic chain metamodel is used to model the motion constraints of the dynamic objects that will be placed in the indoor environments. Whereas the finite state machine metamodel is used to model the states of these dynamic objects and their transitions. The states are used to specify the starting state of an object in the simulation. While the robot can interact with these dynamic objects, there is no dynamic change of state based on events or timers.